
Data sets listed in the VEGA repository can be used only for research purposes.
This database is open, any contributions to the repository is welcome.
If you are interested in using the database, please send a request email in which you briefly summarize your research goals and the planed way you would use the data sets.
| Metadata version | VEGA ID | Date | Site | Objective | Target | Scenario | Rx latitude | Rx longitude | Hardware / Simulator | Unit ID | Radar system versions / Simulator version | Surveillance antennas | Reference antennas | Surveillance antenna heading N [deg] | Reference antenna heading N [deg] | Surveillance channel indices | Reference channel indices | Reference channel polarity | Surveillance channel polarity | Frequency [MHz] | IoO type | IoO location | IoO latitutde | IoO longitude | IoO EIRP [dBm] | IoO Polarity | Configuration ID | Surveillance ID | Number of records | CPI length | Data size [GB] | Data type | Sampling frequency [MHz] | Additional comment | Evaluation comments | Additional meta data sources | File format |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.6 | VEGAS0100 | 220611 | - | Tracker development | Point scatterer | Target receeding with constant velocity from bistatic range cell 0 to 49 | - | - | Simulator Architecture ID: 1 | - | 1.0 | - | - | - | - | 1 | 0 | - | - | 300 | Gaussian noise | - | - | - | - | - | - | - | 50 | 0.131072 | 0.8 | IQ-Complex float 32 | 8 | Target is moving on the range-Doppler map witch chaning its bistatic range only with integer numbers. That is, it moves only with whole cell values. Target SNR is constant 30 dB. | nan | - | nan |
| 1.6 | VEGAS0101 | 220611 | - | Tracker development | Point scatterer | Target receeding with constant velocity from bistatic range cell 0 to 48 | - | - | Simulator Architecture ID: 1 | - | 1.0 | - | - | - | - | 1 | 0 | - | - | 300 | Gaussian noise | - | - | - | - | - | - | - | 50 | 0.131072 | 0.8 | IQ-Complex float 32 | 8 | During the movement of the target the reflected signal takes fractional sample delay values relative to the reference. That is, the target reflection falls between two range cells. Target SNR is constant 30 dB. | nan | - | nan |
| 1.6 | VEGAS0102 | 220628 | - | Range dimension, sub-cell resolution development | Point scatterer | Target receeding with constant velocity from bistatic range cell 50 to 51 in a total of 11 consequtive CPIs. As a results, the true range of the target is increasing with 0.1 cell from one CPI to the next one | - | - | Simulator Architecture ID: 1 | - | 1.0 | - | - | - | - | 1 | 0 | - | - | 300 | Gaussian noise | - | - | - | - | - | - | - | 11 | 0.131072 | 0.176 | IQ-Complex float 32 | 8 | During the movement of the target the reflected signal takes fractional sample delay values relative to the reference. That is, the target reflection falls between two range cells. This fractional cell target range is changing between the CPIS. Target SNR is constant 30 dB. | nan | - | nan |
| 1.6 | VEGAS0200 | 220613 | - | Tracker development | Point scatterer | Target receeding with constant velocity perpendicular to the baseline. The start position of the target is the same as the location of the radar | - | - | Simulator Architecture ID: 2 | - | 1.0 | - | - | - | - | 1 | 0 | - | - | 600 | Gaussian noise | - | - | - | - | - | - | - | 50 | 0.131072 | 0.8 | IQ-Complex float 32 | 8 | Radar-IoO distance is 100m. Target SNR :-40dB | nan | - | nan |
| 1.6 | VEGAS0201 | 220613 | - | Tracker development | Point scatterer | Target receeding with constant velocity 60° in azimuth to the baseline. | - | - | Simulator Architecture ID: 2 | - | 1.0 | - | - | - | - | 1 | 0 | - | - | 600 | Gaussian noise | - | - | - | - | - | - | - | 50 | 0.131072 | 0.8 | IQ-Complex float 32 | 8 | Radar-IoO distance is 1000m. Target SNR :-40dB | nan | - | nan |
| 1.6 | VEGAS0203 | 220613 | - | Tracker development | Point scatterer | Target moving with constant velocity perpendicular to the baseline. The start position of the target is 2000m away from the baseline. | - | - | Simulator Architecture ID: 2 | - | 1.0 | - | - | - | - | 1 | 0 | - | - | 600 | Gaussian noise | - | - | - | - | - | - | - | 300 | 0.131072 | 4.68 | IQ-Complex float 32 | 8 | Radar-IoO distance is 1000m. Target SNR :-40dB | nan | - | nan |
| 1.6 | VEGAS0301 | 220706 | - | Doppler dimension, sub-cell resolution development | Point scatterer | The target range is fixed and located at the 50-th range cell. The Doppler frequency of the target is changed between the 10-th and the 11-th Doppler cell gradually in 11 consequtive CPIs. As a result the true Doppler frequency of the target is increasing with 0.1 cell from one CPI to the next one. | - | - | Simulator Architecture ID: 3 | - | 1.0 | - | - | - | - | 1 | 0 | - | - | 300 | Gaussian noise | - | - | - | - | - | - | - | 11 | 0.131072 | 0.176 | IQ-Complex float 32 | 8 | The reflected signal takes fractional doppler frequency bin values. Target SNR is constant 30 dB. | nan | - | nan |
| 1.6 | VEGAS0302 | 220814 | - | Beamforming development | Point scatterer | The target range is fixed and located at the 50-th range cell and 10th Doppler cell. The azimuth angle is 30°, elevation angle is -30°. | - | - | Simulator Architecture ID: 3.1 | - | 1.0 | - | - | - | - | 1,2,3,4,5,6,7,8,9 | 0 | - | - | 600 | Gaussian noise | - | - | - | - | - | - | - | 10 | 0.131072 | 0.8 | IQ-Complex float 32 | 8 | Target SNR is constant -30 dB. The simulated antenna system is a 3x3 URA with half wavelength inter-element spacing.First element is placed at top left. The last element is placed at bottom right. | nan | - | nan |
| 1.6 | VEGAS0303 | 220913 | - | Calibration development | Point scatterer | The target range is fixed and located at the 50-th range cell and 10th Doppler cell. | - | - | Simulator Architecture ID: 3.1 | - | 1.0 | - | - | - | - | 1,2,3,4,5,6,7,8,9 | 0 | - | - | 600 | Gaussian noise | - | - | - | - | - | - | - | 50 | 0.131072 | 3.9GB | IQ-Complex float 32 | 8 | Target SNR is constant -30 dB. The simulated antenna system is a 3x3 URA with half wavelength inter-element spacing.First element is placed at top left. The last element is placed at bottom right. The appliead IQ phase errors in degree are the folowings: [184.2,300.3,6.8,285.5,0.56,135.2,284.8,140.8,345.4]. | nan | - | nan |
| 1.6 | VEGAS0400 | 221112 | - | Azimuth and elevation DoA estimation/Tracker development, | Point scatterer | Target moving with constant velocity perpendicular to the baseline. The start position of the target is 2000m away from the baseline. In contrast to simulation 0203, the target has non zero altitude. | - | - | Simulator Architecture ID: 4 | - | 1.0 | - | - | - | - | 1,2,3,4,5,6,7,8,9 | 0 | - | - | 600 | Gaussian noise | - | - | - | - | - | - | - | 305 | 0.131072 | 23.8GB | IQ-Complex float 32 | 8 | Radar-IoO distance is 1000m. Target SNR :-20dB on all channels. During the movement both the target azimuth and elevation are chaning. The simulated antenna system is a 3x3 URA with half wavelength inter-element spacing. First element is placed at top left. The last element is placed at bottom right. | nan | - | nan |
| 1.6 | VEGAS0401 | 220913 | - | Azimuth and elevation DoA estimation development with IQ distortions | Point scatterer | Target moving with constant velocity perpendicular to the baseline. The start position of the target is 2000m away from the baseline. In cotast to simulation 0203, the target has non zero altitude. | - | - | Simulator Architecture ID: 4 | - | 1.0 | - | - | - | - | 1,2,3,4,5,6,7,8,9 | 0 | - | - | 600 | Gaussian noise | - | - | - | - | - | - | - | 305 | 0.131072 | 23.8GB | IQ-Complex float 32 | 8 | Radar-IoO distance is 1000m. Target SNR :-20dB on all channels. During the movement both the target azimuth and elevation are chaning. The simulated antenna system is a 3x3 URA with half wavelength inter-element spacing. First element is placed at top left. The last element is placed at bottom right. The appliead IQ phase errors in degree are the folowings: [184.2,300.3,6.8,285.5,0.56,135.2,284.8,140.8,345.4]. | nan | - | nan |
The VEGA data repository stores passive radar measurement. Each data set in the repository has unique name with the following naming convention:
VEGA<M/S> <Date in yyyymmdd format><Hardware id>U<unit id>C<Test configuration ID>S<Surveillance ID><IoO type>e.g.:VEGAM20190101HR2U0C0S0FM. The first identifier (<M/S>) declares whether the data set is originated from measurement or simulation. Each measurement has metadata fields which describes the particular circumstances of the measurement or simulation environment.
The primary stored data in the data sets are the IQ samples. These samples are recorded in rather large data chunks, called coherent processing blocks, which are consqutively time continuous in particular data sets. Each of these coherent processing data blocks are packed into frames by the data acquisition system, named as IQ data frames. An IQ data frame is built up from a header and a payload. Each binary file which has '.iqf' extension in the 'iq' folder stores one IQ data frame. The user can import these data frames, interpret the header, extract the raw data and utilize it for his own research purposes. Documentation and reference scripts to import the IQ data frame are available bellow in this page.
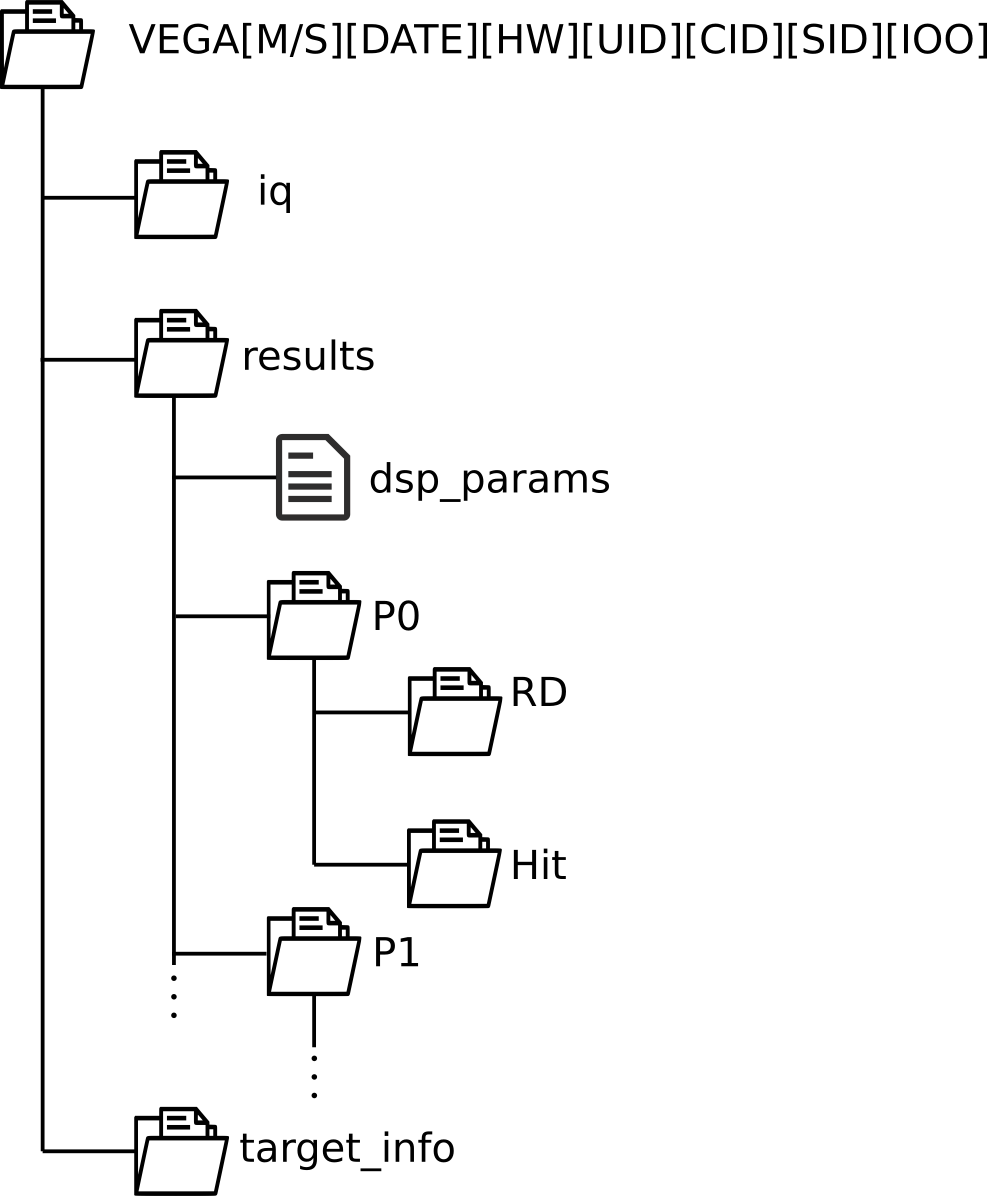
Beside this, there is suplementary information available where applicable. Figure above shows the standard folder structure. The results folder stores range-Doppler matrix and hit matrix pictures from reference processings. The root folder of the K-th reference processing is named as PK. The parameters of each of the reference processing is summarized in the 'dsp_params' file. The target_information folder stores the real latitude and longitude coordinates of the target with timestamps if available. For aerial targets this information is obtained from FlightRadar24. For other cooperative targets, GPS tracker or device own GPS logger is used to obtain the same information. Other than this, the actual range and Doppler coordinates of the detected target is also available for all the coherent processing blocks in which valid detection can be found. The following list summarize the available target information fields and their designation.
Documentation of the IQ Data Frame can be found here:
Version: 1.1, Updated: 2020 01 27
Example python code to convert the IQ Data Frames to MATLAB compatible file can be found in the following GIT repository:
https://github.com/petotamas/vega_database_tools

Referencing:
You can cite the used data set in the following format:
Vega: Data Repository of Passive Radar Measurements, , [Data set]. http://passiveradar.eu/vega